
Shade Triangles
With the function Shade triangles, you can create surface triangulation using points in point clouds, which improves the visibility of the point cloud in shaded mode, especially when zooming in close. However, surface triangles are not geometric elements to which geometric constraints can be bound, for example, but are only surfaces visible during shading.
- Select the function Point clouds |
 Shade triangles.
Shade triangles. - The program opens the dialog box Triangulate. If no surface triangulation has yet been created for the point cloud, the column Status has the value Not created.
- To start surface triangulation, click the field in the Point cloud column that displays a gray lamp icon in addition to the point cloud name. The action applies only to the point cloud in the selected row. You can start triangulation for several selected point clouds. By pressing OK, you can exit the dialog, but the program will still continue the processes in progress in the background.
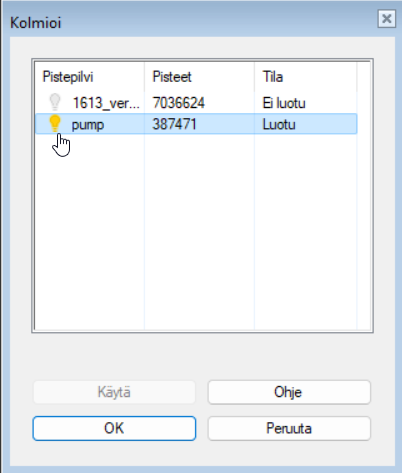
- During surface triangulation in progress, a selection box
 will appear in the Point cloud column instead of a lamp. By pointing the mouse at the field, you can interrupt the ongoing surface triangulation. The program shows the progress in percentage in the Status column.
will appear in the Point cloud column instead of a lamp. By pointing the mouse at the field, you can interrupt the ongoing surface triangulation. The program shows the progress in percentage in the Status column. - The text Created appears in the Status column when surface triangulation is complete. The lamp in the Point cloud column is shown gray by default, so the surface triangulation is not visible. By pointing the mouse at a field, the triangulation is switched on (lamp on) or off (lamp gray).
- If you want to remove the triangulation completely, in the row of the desired point cloud, point to the Status field in the column where the text Created is displayed. The program prompts for confirmation and removes triangulation when answering Yes.
Note: Surface triangulation and its visibility selection are saved with the Vertex model. If surface triangulation is done in a dense point cloud, the model file size can be large. In addition to triangulation, the point cloud also stores scanning point views and possible images.